啤酒碼垛機器人是連接啤酒包裝和倉儲的重要環節,無論是空瓶卸碼垛還是成品堆垛,在啤酒生產物流中都有重要的地位,也是許多啤酒企業目前剛剛開始並亟待完善的地方。我國啤酒業碼垛現狀並不令人滿意,不僅*原始的人工卸碼垛和搬運還普遍存在,普通的輸送、卸垛、碼垛機也未完全普及。美聯科技設計制造的全自動啤酒包裝生產線線碼垛機器人,可以完成48000瓶每小時到60000瓶每小時的碼垛要求,大大提高了碼垛效率。
啤酒碼垛機器人的工作原理
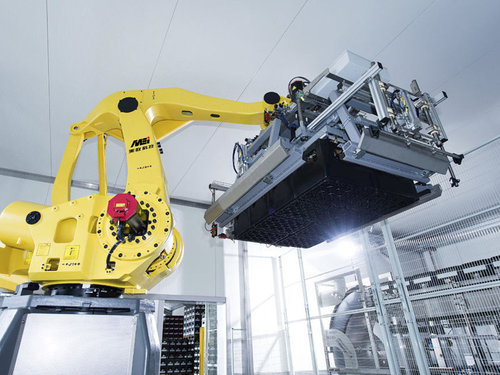
根據啤酒包裝箱碼垛的要求,碼垛機器人主要采用平行四邊形連桿機構,此結構具有穩定性好、承載能力大、結構緊湊等特點。機器人有4個自由度,4個自由度分別由4個伺服電機控制完成三維空間的作業任務。
碼垛的工作原理是機器人由初始位置轉到工作點,手臂下降,抓取由傳送帶送入的酒箱,在托板上進行碼垛。由於在實際情況下,碼盤處的垛形會出現不同的情況,只靠末端執行器抓取或放下酒箱是滿足不了實際需求的,因此就需要通過手腕部的電機驅動來調整末端執行器的位姿,使酒箱達到正確的位置,酒箱在空間中也是通過腕部的調整來實現正確的位姿。機器人的前後臂則是通過各個電機與減速器產生旋轉角度,帶動末端執行器轉到目標點。*後臂部放下酒箱完成碼垛。
碼垛機器人具體工作步驟:末端執行器抓取酒箱→臂部擡起→底座旋轉到目標點→臂部放下→末端執行器松開酒箱。在進行上述工作步驟的時候,為了提高工作效率,各個動作可以實現聯動。比如在臂部擡起和放下的過程中,底座就可以同時進行旋轉操作,但要註意臂部擡起的動作一定要先於底座的旋轉,這樣可以避免因手臂靠下而使酒箱發成碰撞。在整個工作過程中,酒箱完成的是一個曲線的軌跡。